文章目录
- 0.概述
- 1.插入与构造
- 1.1 插入
- 1.1.1 前插入
- 1.1.2后插入
- 1.1.3 复杂度
- 1.2 基于复制构造
- 1.2.1 copyNodes()
- 1.2.2 基于复制构造
- 1.2.3 复杂度
- 2.删除与析构
- 2.1 删除
- 2.1.1 实现
- 2.1.2 复杂度
- 2.2 析构
- 2.2.1 释放资源及清除节点
- 2.2.2 复杂度
- 3.查找
- 3.1 实现
- 3.2 复杂度
- 4.唯一化
- 4.1 实现
- 4.2 复杂度
- 5.遍历
0.概述
介绍下无序列表相关接口,相关接口需要依赖ListNode类,接口如下:
using Rank = unsigned int; //秩
template <typename T> struct ListNode;
template <typename T> using ListNodePosi = ListNode<T>*; //列表节点位置
template <typename T> struct ListNode { //列表节点模板类(以双向链表形式实现)
// 成员
T data; ListNodePosi<T> pred, succ; //数值、前驱、后继
// 构造函数
ListNode() {} //针对header和trailer的构造
ListNode ( T e, ListNodePosi<T> p = NULL, ListNodePosi<T> s = NULL )
: data( e ), pred( p ), succ( s ) {} //默认构造器
// 操作接口
ListNodePosi<T> insertAsPred( T const& e ); //紧靠当前节点之前插入新节点
ListNodePosi<T> insertAsSucc( T const& e ); //紧随当前节点之后插入新节点
};
1.插入与构造
1.1 插入
将节点插至列表的插入算法接口多种,
template <typename T>
ListNodePosi<T> List<T>::insertAsFirst( T const& e )
{ _size++; return header->insertAsSucc( e ); } // e当作首节点插入
template <typename T>
ListNodePosi<T> List<T>::insertAsLast( T const& e )
{ _size++; return trailer->insertAsPred( e ); } // e当作末节点插入
template <typename T>
ListNodePosi<T> List<T>::insert( ListNodePosi<T> p, T const& e )
{ _size++; return p->insertAsSucc( e ); } // e当作p的后继插入
template <typename T>
ListNodePosi<T> List<T>::insert( T const& e, ListNodePosi<T> p )
{ _size++; return p->insertAsPred( e ); } // e当作p的前驱插入
但都可转化为列表节点对象的前插入或后插入接口。
1.1.1 前插入

拓扑连接关系如图a,b,c,d。
注意:列表规模记录的更新由上层调用者负责。另外,得益于头哨兵节点(头尾节点)的存在,即便当前节点为列表的首节点也适用。
template <typename T>
ListNodePosi<T> List<T>::insert( T const& e, ListNodePosi<T> p )
{ _size++; return p->insertAsPred( e ); } // e当作p的前驱插入
template <typename T> //将e紧靠当前节点之前插入于当前节点所属列表(设有哨兵头节点header)
ListNodePosi<T> ListNode<T>::insertAsPred( T const& e ) {
ListNodePosi<T> x = new ListNode( e, pred, this ); //创建新节点
pred->succ = x; pred = x; //设置正向链接
return x; //返回新节点的位置
}
参数e在参数p前,以方便理解接口语义。insert(e,p),节点p前插入元素e。
1.1.2后插入
template <typename T>
ListNodePosi<T> List<T>::insert( ListNodePosi<T> p, T const& e )//接口与语义对应,参数e在p后
{ _size++; return p->insertAsSucc( e ); } // e当作p的后继插入
template <typename T> //将e紧随当前节点之后插入于当前节点所属列表(设有哨兵尾节点trailer)
ListNodePosi<T> ListNode<T>::insertAsSucc( T const& e ) {
ListNodePosi<T> x = new ListNode( e, this, succ ); //创建新节点
succ->pred = x; succ = x; //设置逆向链接
return x; //返回新节点的位置
}
1.1.3 复杂度
上述两种插入操作过程,仅涉及局部的两个原有节点和一个新节点,且不含任何迭代或递归。若假设当前节点已经定位,不计入此前的查找所消耗的时间,则它们都可在常数时间内完成。
1.2 基于复制构造
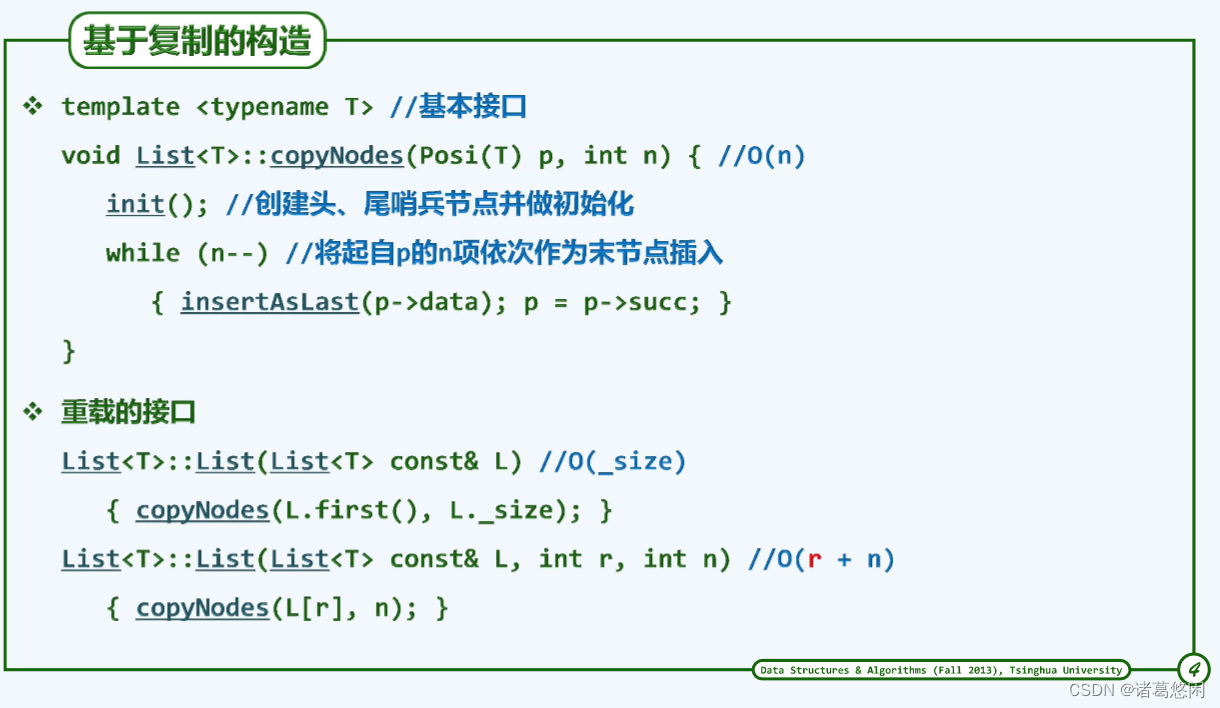
1.2.1 copyNodes()
尽管这里提供了多种形式,以允许对原列表的整体或局部复制,但其实质过程均大同小异,都可概括和转化为底层内部方法copyNodes()。
template <typename T> //列表内部方法:复制列表中自位置p起的n项
void List<T>::copyNodes( ListNodePosi<T> p, Rank n ) { // p合法,且至少有n-1个真后继
init(); //创建头、尾哨兵节点并做初始化
while ( n-- ) { insertAsLast( p->data ); p = p->succ; } //将起自p的n项依次作为末节点插入
}
1.2.2 基于复制构造
基于上述copyNodes()方法可以实现多种接口,通过复制已有列表的区间或整体,构造出新列表。
template <typename T> //复制列表中自位置p起的n项(assert: p为合法位置,且至少有n-1个后继节点)
List<T>::List( ListNodePosi<T> p, Rank n ) { copyNodes( p, n ); }
template <typename T> //整体复制列表L
List<T>::List( List<T> const& L ) { copyNodes( L.first(), L._size ); }
template <typename T> //复制L中自第r项起的n项(assert: r+n <= L._size)
List<T>::List( List<T> const& L, Rank r, Rank n ) {
ListNodePosi<T> p = L.first();
while ( 0 < r-- ) p = p->succ;
copyNodes ( p, n );
}
1.2.3 复杂度
复制接口的总体复杂度应为O(r + n + 1)。
2.删除与析构
2.1 删除
2.1.1 实现
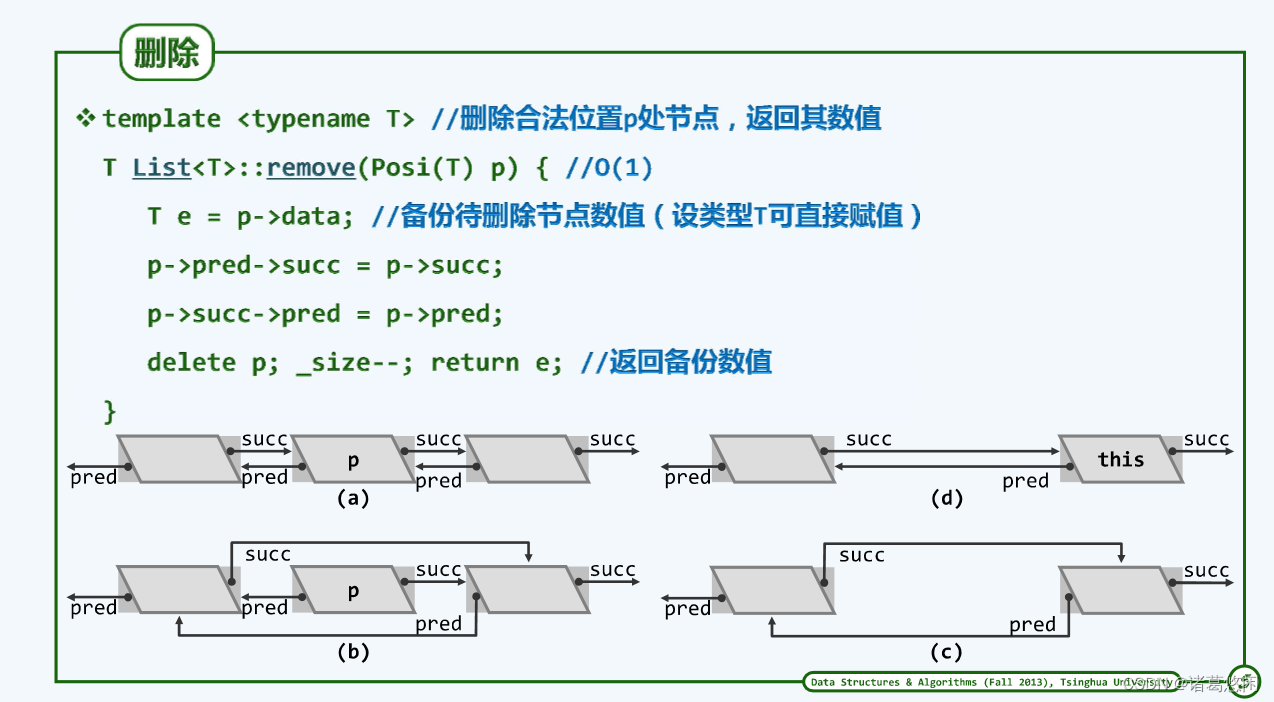
删除节点后,列表的拓扑连接关系如图a,b,c,d。
template <typename T>
T List<T>::remove( ListNodePosi<T> p ) { //删除合法节点p
T e = p->data; //备份待删除节点的数值(假定T类型可直接赋值)
p->pred->succ = p->succ; p->succ->pred = p->pred; //短路联接
delete p; _size--; //释放节点,更新规模
return e; //返回备份的数值
} //O(1)
2.1.2 复杂度
以上过程仅涉及常数次基本操作,故若不计入此前为查找并确定位置p所消耗的时间,列表的节点删除操作可在常数时间内完成。
2.2 析构
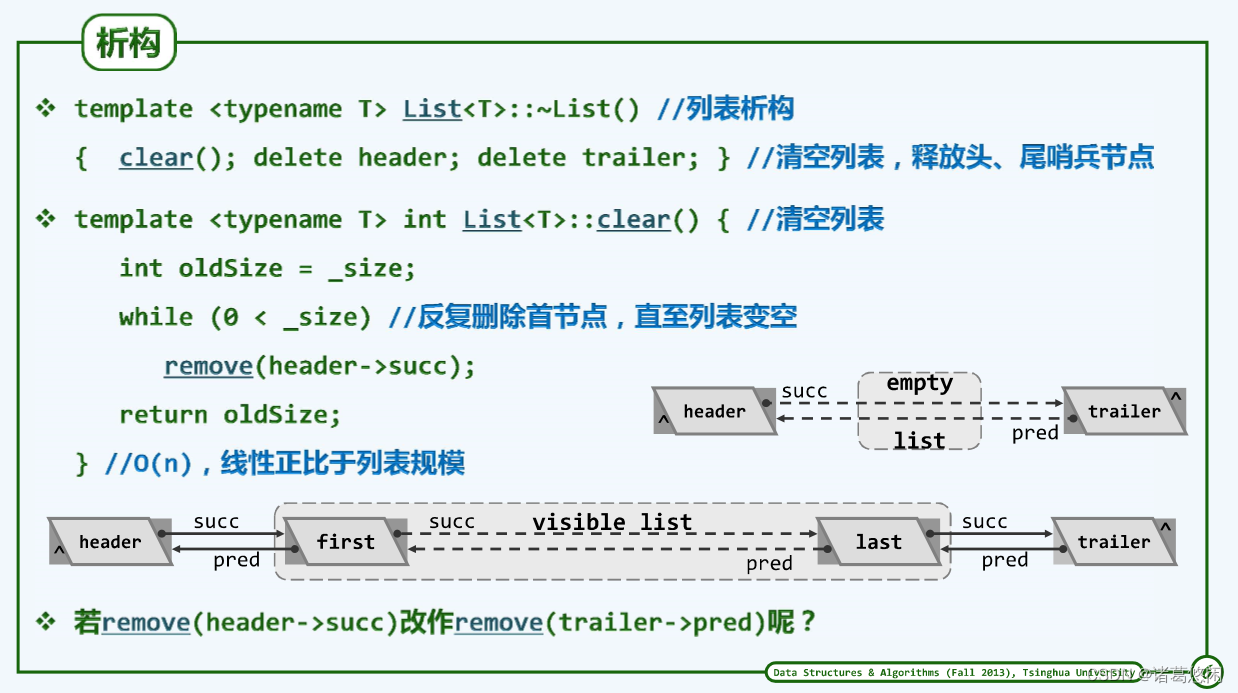
2.2.1 释放资源及清除节点
template <typename T>
List<T>::~List() //列表析构器
{ clear(); delete header; delete trailer; } //清空列表,释放头、尾哨兵节点
template <typename T>
Rank List<T>::clear() { //清空列表
Rank oldSize = _size;
while ( 0 < _size ) remove ( header->succ ); //反复删除首节点,直至列表变空
return oldSize;
}
列表的析构需首先调用clear()接口删除并释放所有对外部有效的节点,然后释放内部的头、尾哨兵节点。
2.2.2 复杂度
这里的时间消耗主要来自clear()操作,该操作通过remove()接口反复删除列表的首节点。因此,clear()方法以及整个析构方法的运行时间应为O(n),线性正比于列表原先的规模。
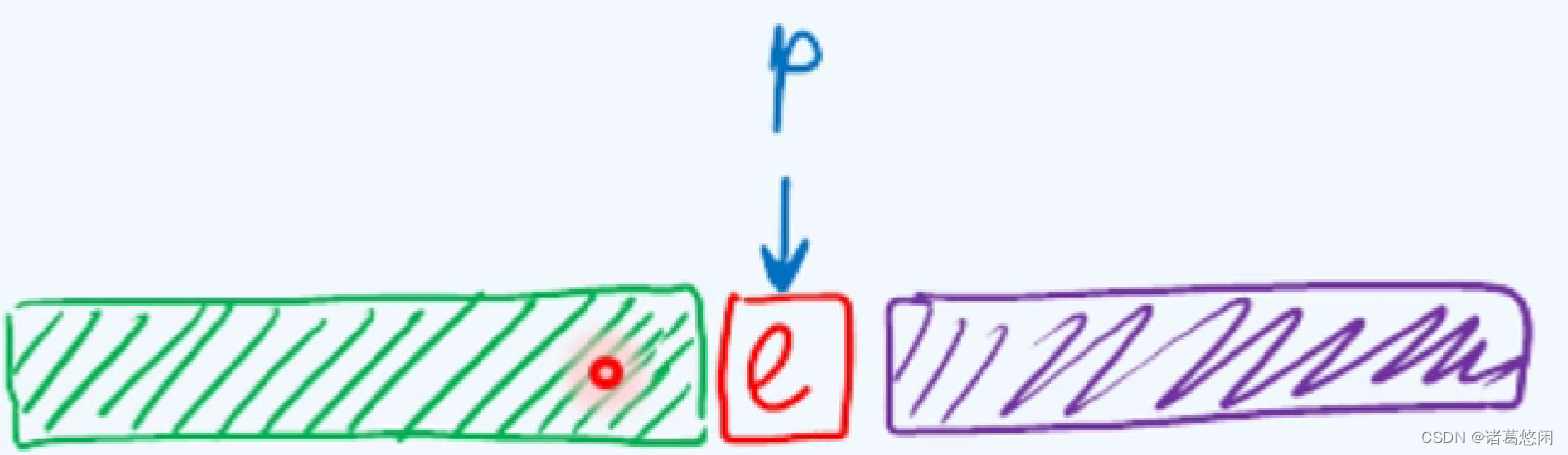
3.查找
3.1 实现
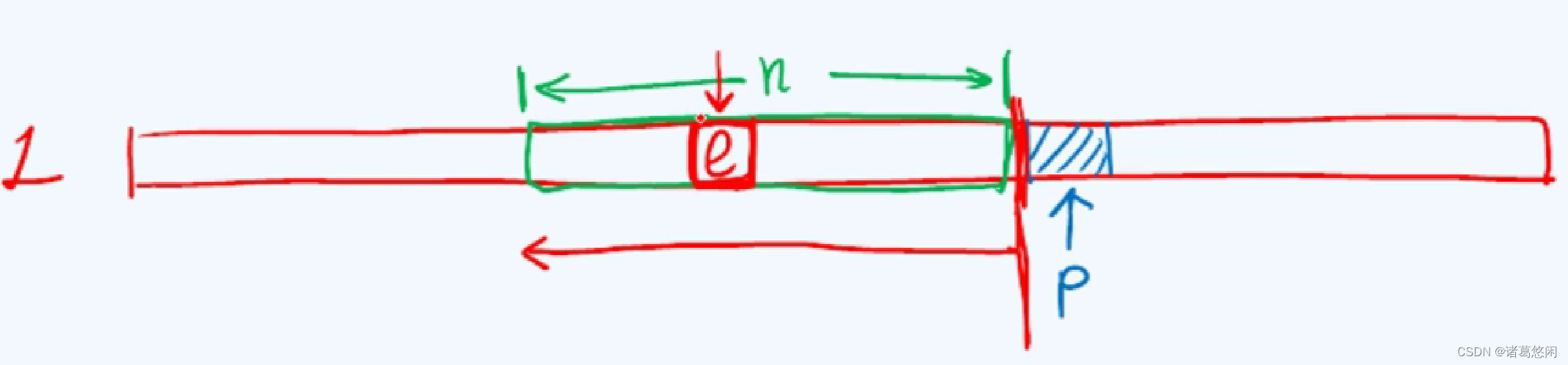
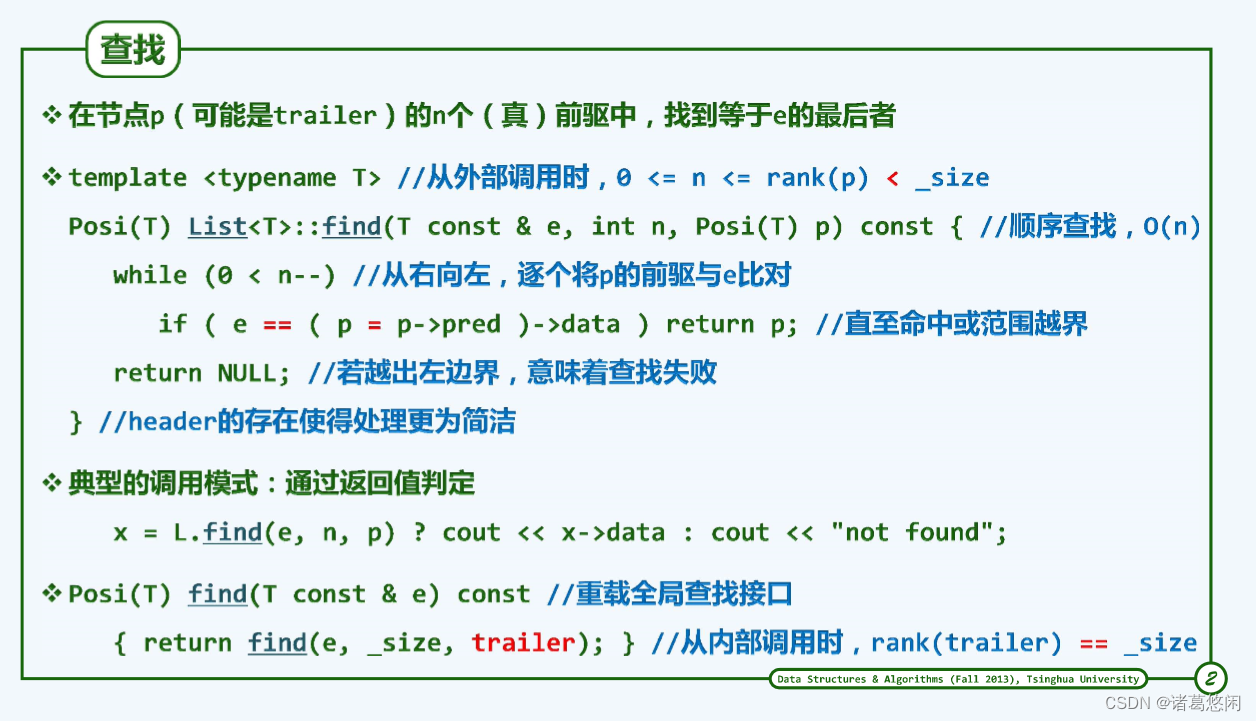
template <typename T> //在无序列表内节点p(可能是trailer)的n个(真)前驱中,找到等于e的最后者
ListNodePosi<T> List<T>::find( T const& e, Rank n, ListNodePosi<T> p ) const {
while ( 0 < n-- ) //(0 <= n <= Rank(p) < _size)对于p的最近的n个前驱,从右向左
if ( e == ( p = p->pred )->data ) return p; //逐个比对,直至命中或范围越界
return NULL; //p越出左边界意味着区间内不含e,查找失败
} //失败时,返回NULL
注意:若列表中待查找的元素e有多个,返回秩最大者。
3.2 复杂度
以上算法的思路及过程,与无序向量的顺序查找算法Vector::find()相仿,故时间复杂度也应是O(n),线性正比于查找区间的宽度。
4.唯一化
4.1 实现
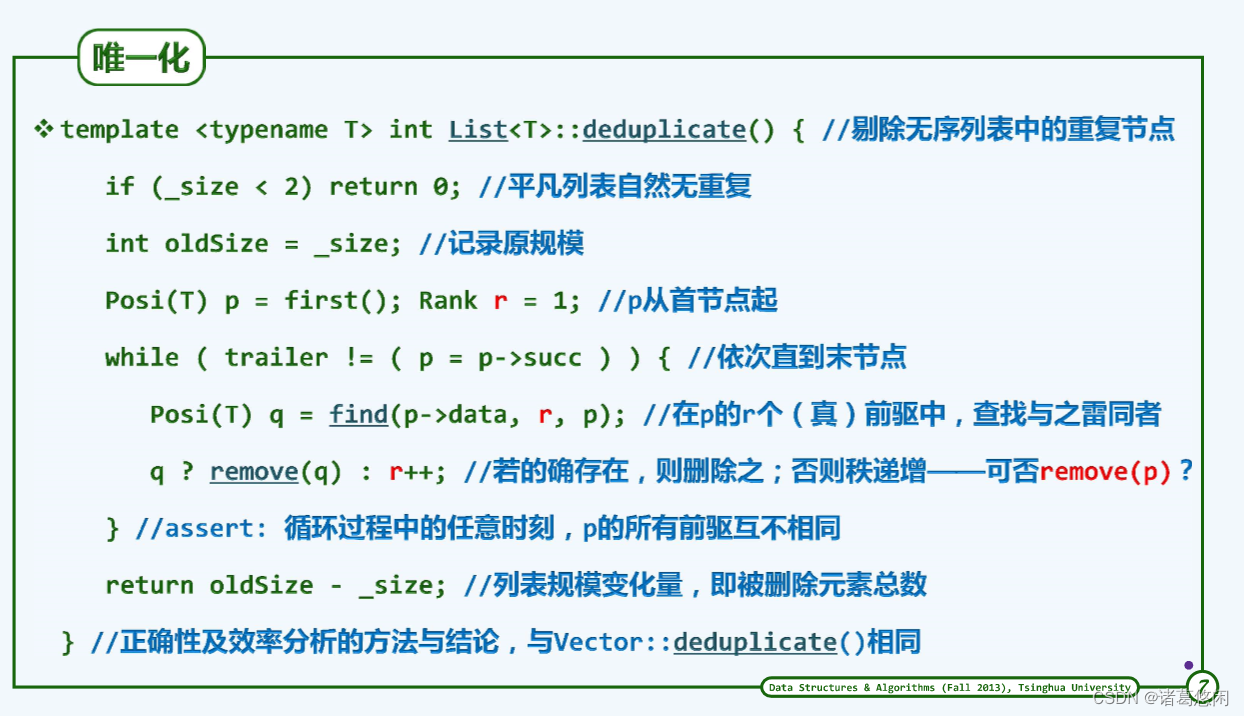
与算法Vector::deduplicate()类似,这里也是自前向后依次处理各节点p,一旦通过find()接口在p的前驱中查到雷同者,则随即调用remove()接口将其删除。
4.2 复杂度
与无序向量的去重算法一样,该算法总共需做O(n)步迭代。每一步迭代中find()操作所需的时间线性正比于查找区间宽度,即当前节点的秩;列表节点每次remove()操作仅需常数时间。因此,总体执行时间应为:
1 + 2 + 3 + … + n = n∙(n + 1) / 2 = O
(
n
2
)
(n^2)
(n2)
相对于无序向量,尽管此处节点删除操作所需的时间减少,但总体渐进复杂度并无改进。
5.遍历
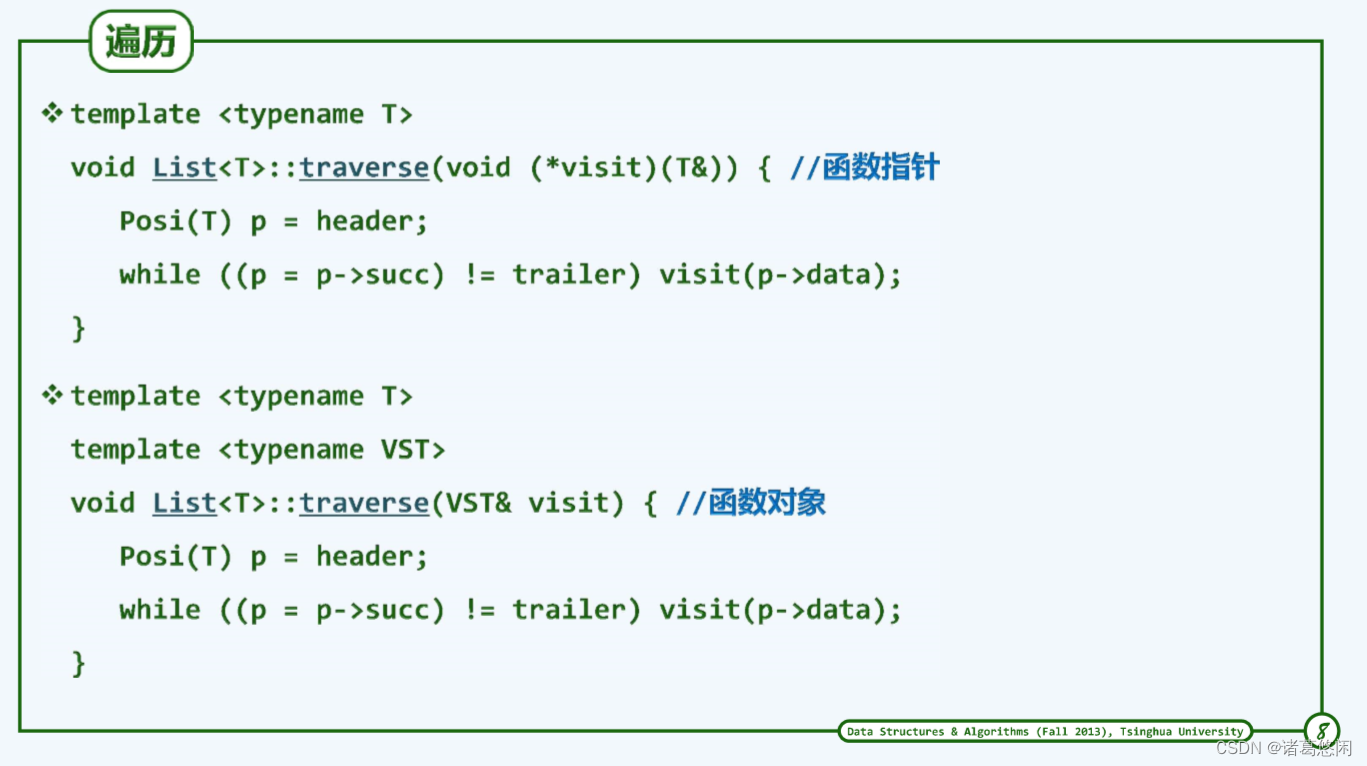
template <typename T>
void List<T>::traverse( void ( *visit )( T& ) ) //借助函数指针机制遍历
{ for ( ListNodePosi<T> p = header->succ; p != trailer; p = p->succ ) visit ( p->data ); }
template <typename T> template <typename VST> //元素类型、操作器
void List<T>::traverse( VST& visit ) //借助函数对象机制遍历
{ for ( ListNodePosi<T> p = header->succ; p != trailer; p = p->succ ) visit ( p->data ); }
该接口的设计思路与实现方式,与向量的对应接口如出一辙,复杂度也相同O(n)。
![[贪心] 区间选点问题](https://img-blog.csdnimg.cn/direct/42eea149a9d8494d8af7b749c42e2c3a.png)


![[报错解决]Communications link failure](https://img-blog.csdnimg.cn/direct/cde2905fdd5f43aea5931a324882ec59.png)